Jyothi Swaroop
Jyothi Swaroop
Home
About
Projects
Resume
Linkedin
Github
Light
Dark
Automatic
State Estimation
Extended Kalman Filter SLAM
EKF SLAM on TurtleBot3 from scratch in C++.
Code
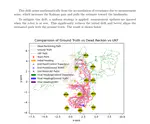
Unscented Kalman Filter
State Estimation for a mobile robot using UKF on the MRCLAM dataset.
Code