Franka Ball Catcher: Vision-Based Ball detection, prediction and catching with a Robotic Arm
Overview
This project develops a vision-based object detection and interception system using a Franka Emika Panda robotic arm. An external camera tracks a moving ball in real time, while a trajectory prediction module estimates its future position and guides the robot to intercept and catch the ball. The system integrates perception, prediction, and control to enable autonomous, dynamic manipulation in a very short time of ~1s.
The major complexities in the system are :
- A short time of flight of the ball
- A limited field of view of the camera.
- High speed movement of the robot without hitting joint limits.
System Components
| Component | Description |
|---|---|
| Robot | Franka Emika Panda 7-DOF robot arm |
| Camera | Realsense camera D455 |
| Middleware | ROS2 |
| Calibration | eye-on-base with easy_handeye2 package |
| Vision | OpenCV/YOLO implementation for ball detection |
| Motion Planning | MoveIt 2 API for Cartesian and Joint-space planning |
| Trajectory Prediction | Least Squares with Median Absolute Deviation (outlier rejection) |
| Catch equipment | 3D-printed hoop with fish net |
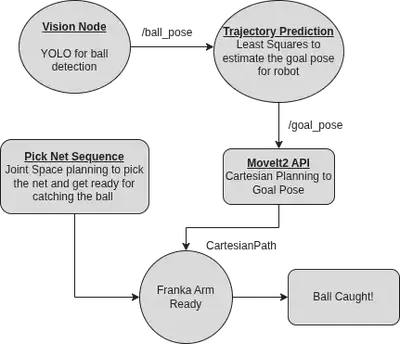
Architechture
Calibration Pipeline
The system uses an external camera mounted behind the robot arm, giving it a wide field of view without interfering with the robot’s workspace. The calibration process works as follows:
- An ArUco marker is attached to the end-effector of the Franka Emika Panda arm.
- Using the MoveIt 2 API in RViz, the robot is manually guided close to the camera.
- A custom calibration node is launched, and the arm is moved through multiple poses so the camera can observe the marker from different viewpoints.
- After collecting ~15 valid measurements, the pipeline computes the extrinsic calibration, producing a fixed transform between the robot’s base frame and the camera’s camera_link frame.
This calibrated transform enables accurate robot–camera frame alignment for perception and manipulation tasks.
Vision Pipeline
The vision pipeline is responsible for detecting the ball and estimating its 3D position in real time.
Data Collection and Training
- Multiple rosbags were recorded by throwing the ball in different trajectories and conditions.
- The collected data was labeled and used to train a YOLO object detection model using Roboflow.
- The trained model weights are loaded by the vision node at runtime.
Ball Detection
- The vision node subscribes to the camera
image_rawtopic and runs YOLO inference on incoming frames. - When the ball is detected, its 2D image coordinates are extracted from the bounding box output.
3D Pose Estimation
- Using the camera’s depth info, the ball’s 2D detection is projected into 3D space.
- The resulting 3D position is then obtained in the camera frame.
ROS 2 Integration
- The
ballframe is added to thetf_treeand this way thebase--balltransform can now be looked up. The pose of the ball is also published onball_posetopic for rviz.
Trajectory Prediction
The trajectory prediction module estimates the ball’s future motion and computes a reachable intercept pose for the robot.
Parabolic Trajectory Fitting
- The system looks up the TF transform between the robot base frame and the detected ball frame.
- Using the first few in-flight ball measurements (a parameter tuned through experimentation), a Least Squares method is used to fit a 3D parabolic trajectory.
- Median Absolute Deviation (MAD) is applied for outlier rejection, improving robustness to noisy detections.
- From the fitted trajectory, an intercept goal_pose with a fixed plane in the robot workspace is estimated and published to a
goal_posetopic and added to thetf_treeas a frame for visualization in rviz.
End-Effector Alignment Optimization
- Initially, the robot was sent directly to the goal pose with a fixed x-axis offset to account for the net position, which led to consistent small errors.
- To improve accuracy, we leveraged the robot’s end-effector rotation, which has high freedom of motion.
- In the goal_pose frame, the vector offset between the net center and the end-effector was estimated.
- The final end-effector position was computed to allow a compensating rotation, rather than a fixed translation.
This adjustment significantly increased the catch success rate by better exploiting the robot’s kinematic flexibility.
Robot Control
The robot control module executes the catch once a valid intercept pose is available.
Initial Configuration
- The robot starts in a ready pose, holding the net in a fixed plane defined by a configurable z-axis height.
Goal Pose and Planning
- The predicted goal pose is computed as the intersection of the ball’s parabolic trajectory with the predefined plane.
- Since both the start pose and goal pose lie on this plane, the system uses Cartesian path planning for the end-effector.
- Cartesian planning is preferred over joint-space planning as it is faster and more reliable for short, constrained motions.
Execution and Control
- The catcher node continuously listens to the
/goal_posetopic. - Upon receiving a valid goal pose, it immediately commands the robot to move to the target.
- Velocity scaling and acceleration scaling are set to 0.9 to achieve high-speed, responsive motion required for catching.
This control strategy enables rapid and precise execution during the ball’s flight time.
Key Challenges Solved
- Robust ball detection using YOLOv11.
- Accurate trajectory prediction using Least Squares with MAD outlier rejection.
- Increased catch success using end-effector rotation for alignment.
- Fast and precise motion via Cartesian path planning on a fixed z-plane.
- Real-time integration of vision, prediction, and control in ROS.
Contribution
- Integrated the calibration pipeline with the robot and camera system.
- Configured and set up the vision pipeline within ROS (excluding YOLO model training).
- Developed the ROS infrastructure and modular launch files for end-to-end testing, enabling faster development and iteration cycles.
- Responsible for code cleanup, refactoring, and improving maintainability across the project.
Acknowledgements
This project was developed as a final project for ME495: Embedded Systems in Robotics at Northwestern University, under the instruction of Professor Matthew Elwin. It was completed collaboratively with Anunth Ramaswami, Kyle Thompson, and Zixin Ye, whose teamwork and technical contributions were essential to the project’s success.
The project emphasizes real-world robotic system design, highlighting the gap between idealized simulation and physical execution.