EKF SLAM: Simultaneous Localization and Mapping on a TurtleBot3
Overview
A full EKF SLAM pipeline on a TurtleBot3, implemented entirely from scratch in C++ and ROS 2 — no nav-stack or third-party SLAM libraries. This includes a custom 2D rigid-body transform library, differential-drive kinematics, forward/inverse velocity computation, odometry, an Extended Kalman Filter for SLAM, laser-scan clustering, circle fitting, and data association.
The project spans four ROS 2 packages:
| Package | Purpose |
|---|---|
| turtlelib | From-scratch 2D geometry, diff-drive kinematics and odometry library |
| nuturtle_description | Custom URDF for multi-robot visualisation in Rviz |
| nusim | Simulator with obstacles, walls, fake encoders and lidar |
| nuturtle_control | Velocity command interface for real and simulated robots |
| nuslam | EKF SLAM, landmark detection and data association |
EKF SLAM
The EKF jointly estimates the robot pose $(x, y, \theta)$ and all landmark positions. Wheel odometry drives the prediction step and landmark observations drive the correction step, producing a map-to-odom transform that compensates for odometry drift.
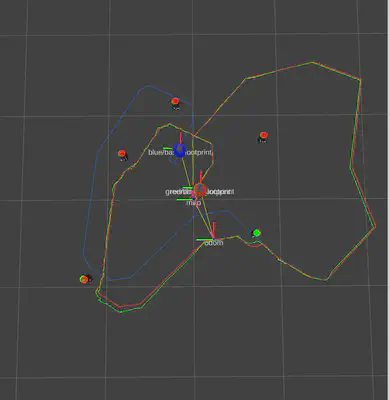
In Rviz:
- Red robot — ground truth (simulation only)
- Blue robot — dead-reckoning (odometry only, no corrections)
- Green robot — EKF SLAM corrected estimate
Landmark Detection
Landmarks are detected from raw lidar scans through a pipeline that is also written from scratch:
- Clustering — adjacent scan points are grouped using an adaptive distance threshold, with wrap-around handling for the first and last clusters.
- Circle fitting — each cluster is fit to a circle using a least-squares algebraic fit, rejecting clusters whose radius falls outside an expected range.
- Data association — detected circles are matched to existing landmarks in the EKF state via Mahalanobis distance; unmatched detections initialise new landmarks.
SLAM with Unknown Data Association (Simulation)
The green robot (EKF SLAM) tracks the red ground truth closely while the blue robot (odometry) drifts. Cyan cylinders are circle-fit detections from the lidar and green cylinders are the associated landmarks maintained by the filter.
EKF SLAM on the Real TurtleBot
Running on the physical TurtleBot3 with real lidar data. The blue robot accumulates odometry drift while the green robot corrects its pose using landmark observations from the environment.
Acknowledgements
This project was developed as part of ME495: Sensing, Navigation and Machine Learning for Robotics at Northwestern University, under the instruction of Professor Matthew Elwin.