
Autonomous Humanoid Exploration
Indoor SLAM and Autonomous Navigation on the Unitree G1 Humanoid
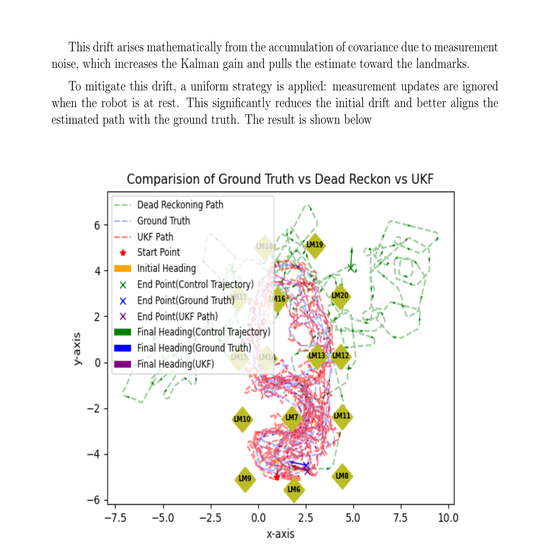
Unscented Kalman Filter
State Estimation for a mobile robot using UKF on the MRCLAM dataset.
Indoor SLAM and Autonomous Navigation on the Unitree G1 Humanoid
State Estimation for a mobile robot using UKF on the MRCLAM dataset.